Xincao (Neil) Xu (Chinese character 许新操 or 許新操) is currently an Associate Researcher in computer science and a supervisor of Master’s students with the Shenzhen Institute for Advanced Study, University of Electronic Science and Technology of China (UESTC), Shenzhen, China.
He received the Ph.D. degree in computer science from the College of Computer Science, Chongqing University (CQU), Chongqing, China, in 2023.
From 2023 to 2025, he was a Postdoctoral Research Fellow with the Shenzhen Institute for Advanced Study, UESTC.
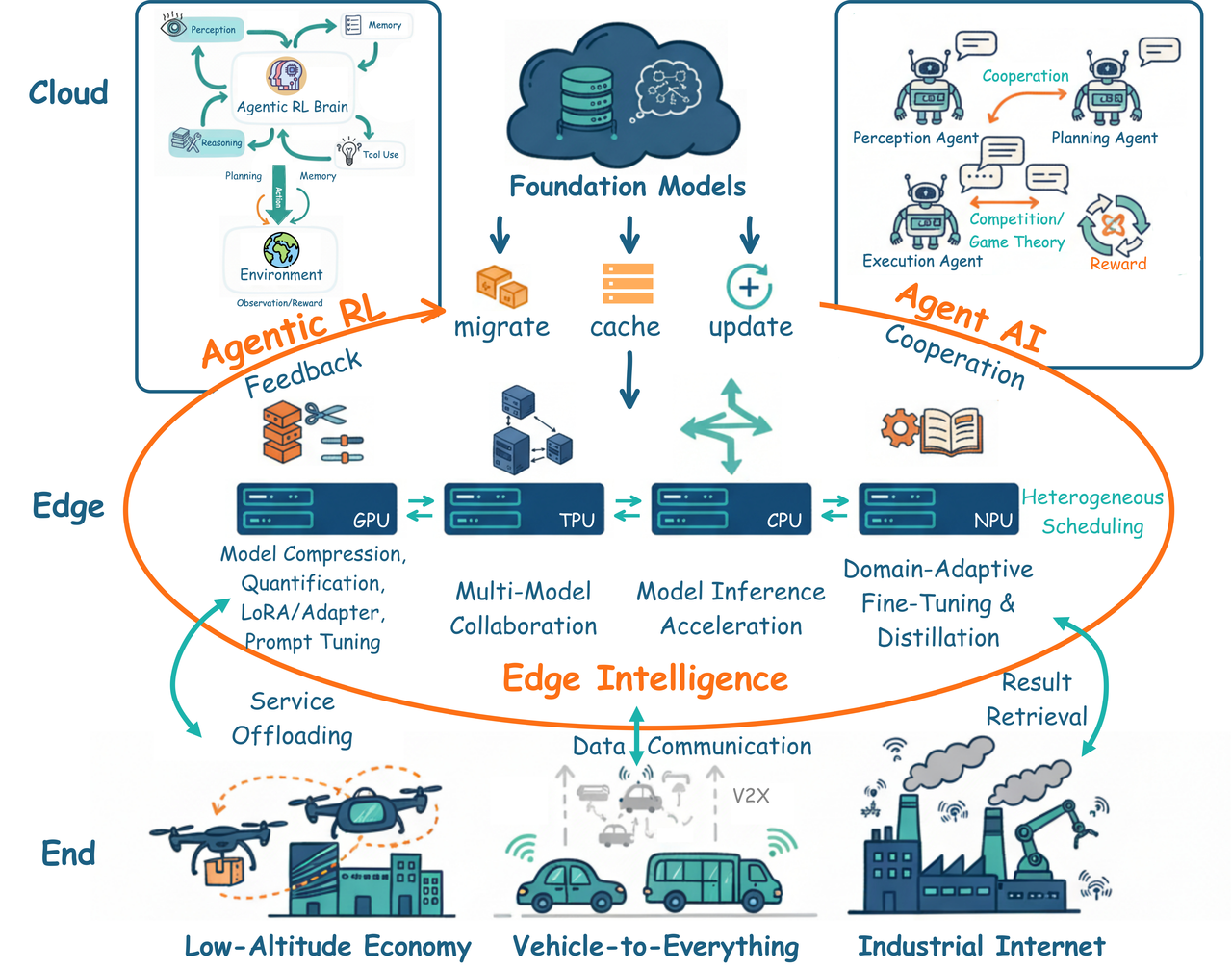
His research interests include edge intelligence, agentic AI, and agentic RL.
He has authored and co-authored more than 20 papers with total google scholar 
|
Contact Information: Office Address: Room 408, Building 3, YESUN Intelligent Community II, Guanlan Street, Longhua District, Shenzhen 518110, China E-mail: xcDOTxuATuestcDOTeduDOTcn |
🔥 News
🔈 Call for Students
Prof. Xu is now recruiting highly motivated undergraduate and Master’s students to join our research group. If you are passionate about cutting-edge technologies in edge intelligence, agent artificial intelligence, and agentic reinforcement learning, we encourage you to apply!
🎯 We Offer
- Respect for students’ interests in determining research directions, with full support provided to the greatest extent possible.
- Weekly group meetings to ensure steady progress and effective collaboration.
- Guidance for publishing in top-tier conferences and journals.
- Full support for personal academic growth and career development.
✅ We Are Looking For Students Who
- Have a background in Computer Science, Telecommunications, Automation, or related fields.
- Are proficient in programming (e.g., Python, C++).
- Possess a solid mathematical foundation (optimization, linear algebra, probability).
- Have prior experience or strong interest in edge intelligence, LLM agents, and reinforcement learning.
📧 How to Apply
Interested candidates are welcome to contact Prof. Xu via email with your CV, academic transcripts, and a brief self-introduction.
We look forward to hearing from you!
🔬 Research
🏫 Teaching
🧑🏫 Homeroom Teacher
- Homeroom Teacher for STEM Education, Shenzhen Longhua S&T Experimental High School, May 2025 - May 2028.
📚 Students & Alumni
Loading...
📖 Publication
| JCR: Journal Citation Reports | SCI: Journal Partition List | CCF: CCF Recommended |
🏆 Grants
Loading grants...
✨ Others
📄 Patents
- Xin Ma, Shaohua Wan, Xuqi Cai, Lixin Duan, Wen Li, Xincao Xu, “A Multimodal Fusion Method, Device, and Storage Medium for Autonomous Driving”, Chinese Invention Patent, ZL202510951173.X, CN120451728B, 2025.
- Xincao Xu, Kai Liu, Dong Li, “A Control Plane View Construction Method for Software-Defined Vehicular Networks”, Chinese Invention Patent, ZL202110591822.1, 2022.
- Liu Kai, Zhang Lang, Xincao Xu, Ren Hualing, Zhou Yi, “An Edge Computing Based Collision Warning Method for Vehicles in Blind Areas”, Chinese Invention Patent, ZL201910418745.2, 2021.
- Ren Hualing, Liu Kai, Chen Mengliang, Zhou Yi, Xincao Xu, “A Fog Computing-based Information Acquisition, Computing, and Transmission Architecture”, Chinese Invention Patent, ZL201910146357.3, 2021.
📺 Demo
- Joint Model Caching and Inference System
- Non-Light-of-Sight (NLOS) Collision Warning System
📢 Call for Papers
Loading conference deadlines...
👨🏻💻 Experience
💼 Work
Loading...
🎓 Education
Loading...
😎 Membership
Loading...
🤝 Services
🎤 Talks
- Asia-Pacific Association of Cognitive Intelligence, Featured Doctoral Forum Series, “Key Technologies for Dynamic Modeling and Collaborative Optimization of Vehicular Digital Twins”, May 28, 2025.(in Chinese)

📑 Program Committee Member
- CCF Intelligent Vehicles Symposium (CIVS) 2025
👀 Reviewer
Loading...
🏆 Awards
Loading...
📦 Resources
Opinions and Experiences
- Why We Block Our Path by Prof. Hui Xiong (in Chinese)
Shareable Materials
- Conference Proceedings and Journals Related to Internet of Vehicles
- Handbook for Research Beginner 01: Research Tools and Paper Reading (in Chinese)
- Handbook for Research Beginner 02: Paper Architecture and Writting (in Chinese)
- Handbook for Research Beginner 03: Patent Drafting (in Chinese)
Courses
- Introduction to Algorithms by MIT
- Meachine Learning by Prof. Hung-yi Lee
- Meachine Learning by Prof. Richard Xu
- Deep Learning by Prof. Andrew Ng
- Deep Reinforcement Learning by Dr. Shusen Wang





Books

|
Meachine Learning Prof. Zhi-Hua Zhou Tsinghua University Press, 2016 ISBN: 9787302423287 🇨🇳Chinese |
|
|
Machine Learning Yearning Prof. Andrew NG Free Ebook, 2018 🇬🇧English | 🇨🇳Chinese |
|
|
Deep Learning Dr. Ian Goodfellow, Prof. Yoshua Bengio, and Prof. Aaron Courville MIT Press, 2016 ISBN: 9780262035613 🇬🇧English | 🇨🇳Chinese |
|
|
Dive into Deep Learning Dr. Aston Zhang, Dr. Zachary C. Lipton, Dr. Mu Li, and Dr. Alexander I. Smola Cambridge University Press, 2023 ISBN: 1009389432 🇬🇧English | 🇨🇳Chinese |
Research
- Google Scholar: Largest Search Engine for Academic Publishing
- dblp: Computer Science Bibliography
- Conference Partner: Information about Academic Conferences
- Networking Conferences Statistics: Year-over-year Statistics for Networking Conferences
- LetPub: Information about SCI Journals
- Academic Accelerator: Wonderful Tool to Accelerate Your Scientific Research
- WikiCFP: A Wiki for Calls for Papers
- Zotero: Personal Research Assistant
- IEEE Template Selector: Find the Right IEEE Article Template for Your Target Publication
Grant
- NSFC Big Data: Official Big Data Knowledge Management Service Portal of National Natural Science Foundation
- LetPub: Scientific Fund Results Inquiry System
- NSFC Proposal Template: Unofficial LaTeX Format Template for National Natural Science Foundation of China Grant Applications
- Full Names of Related Funds: Chinese-English Comparison
- Funding, Award, and Scholarship Translation summarized by Xovee Xu
Coding
- Python Tutorial by Xuefeng Liao 🇨🇳Chinese
- Python Documentation 🇬🇧English 🇨🇳Chinese
- Python for Beginners 🇨🇳Chinese
🧩 Interests
🎵 Music
- Recently on Repeat
- Favorite Albums
 |
 |
 |
 |
 |
 |
 |
 |
| The 400 Blows Sigle |
Aqua Hotel Sigle |
Summer Time EP |
Bedazzling | Real Love Is... | David Tao | Sense+ | Bye Bye That's All |
| Roy Wang | Roy Wang | Roy Wang | Roy Wang | The Chairs | David Tao | The Life Journey | Bad Sweetheart |
| 2020 | 2020 | 2021 | 2022 | 2020 | 1997 | 2018 | 2021 |
- Step into his world of melodious favorites and discover a carefully curated music collection.

- Explore his Replay 2023 playlist, a journey through his most played tracks on
🎬 Movies
 |
 |
 |
 |
 |
|
| The Secret Life of Walter Mitty | Romeo + Juliet | Moulin Rouge! | Call Me by Your Name | A Clockwork Orange | |
| Ben Stiller | Baz Luhrmann | Baz Luhrmann | Luca Guadagnino | Stanley Kubrick | |
| 2013 | 1996 | 2001 | 2017 | 1971 |
🏃 Sports
Passionate about fitness, he has earned a series of accolades in his active lifestyle.
- 🆚 Events (PB: Personal Best)
| Event Name | Result | Details | Location | Date |
|---|---|---|---|---|
| Chongqing (Changjiahui) Half Marathon | 03:05:06 (PB) | Average pace: 08'46'' (PB) | Chongqing 🇨🇳 | Nov 3, 2024 |
| Shenzhen Guanlan River Dragon Boat Race |
Round 100:02:16.882
Round 200:02:14.111
Round 300:02:10.849
Average00:02:13.947
|
350 m, 12-person dragon boat race Role: paddler Crew format1 drummer, 1 steersperson, 10 paddlers |
Shenzhen 🇨🇳 | Jun 5, 2026 |
- 🏅 Medal
 |
 |
 |
 |
 |
 |
| Summit of Wutong Mountain | Find Your Way given by BFF | Decathlon SAKURA Cycling | Chongqing Mountain City Street & Alley Orienteering Challenge | Chongqing (Changjiahui) Half Marathon | Campus Fun Games |
| Jan 20, 2024 | Mar 11, 2024 | Mar 22, 2024 | May 26, 2024 | Nov 3, 2024 | May 16, 2025 |
- 🍎 Apple Fitness achievements
 |
 |
 |
 |
 |
 |
 |
 |
| Four-week continuous Fitness+ workout streak award | Daily Move goal reached 100 times award | 50th Fitness+ Treadmill workout accomplishment | 50-time winner of the 7-workouts-per-week challenge | Top cycling calorie burner award (525 Calories) | Peak calorie burn on the elliptical award (645 Calories) | Maximum calories burned running award (579 Calories) | Highest calories burned swimming award (157 Calories) |
| Aug 15, 2023 | Nov 30, 2021 | Aug 7, 2023 | Sep 22, 2023 | May 17, 2023 | Jan 21, 2023 | Aug 16, 2023 | Jun 13, 2023 |
🎮 Gaming
His world of gaming spans across various consoles, offering endless adventures and excitement.
- Connect with him on
by adding his Friend Code: SW-2057-0942-7707
- The Legend of Zelda: Breath of the Wild
- The Legend of Zelda: Tears of the Kingdom
- Super Smash Bros.
- Splatoon 3
- Mario Kart 8 Deluxe
- Animal Crossing: New Horizons
- Nintendo Year in Review 2023
 |
 |
 |
- Join him on
by adding him PSN ID: near_dws
- The Last of Us Part I
- Final Fantasy VII Remake
- Detroit: Become Human
- Life is Strange 2
- Life is Strange: True Colors
📱 Tech
His interest in digital gadgets extends to a wide range of hardwares and softwares.
Hardware
Software
| Tool | Using | |
|---|---|---|
| 💻 Operating System | macOS Sonoma | |
| 📧 Email Client | Canary Mail | |
| ⌨️ Command Line Interface | Warp | |
| 🌐 Web Browser | Safari | |
| 💬 Instant Messaging | Telegram | WeChat | iMessage | |
| 🎵 Music Player | Apple Music | Spotify | |
| 👨💻 Coding Environment | Visual Studio Code | |
| 📝 Text Editor | Sublime Text | |
| ⌨️ Input Method Editor | RIME Squirrel | ABC | |
| 📊 Productivity Suite | Microsoft 365 | Keynote | Notion | |
| 🔣 LaTex Editor | Texifier | Overleaf | |
| 📄 Reference Manager | Zotero | |
| 🔍 PDF Reader | PDF Expert | Adobe Acrobat | |
| 🎨 Graphic Design | Wondershare EdrawMax | Microsoft PowerPoint | |
| 🗣️ Communication | VooV Meeting | Zoom | |
| 🎬 Video Streaming | Bilibili | Netflix | YouTube | Apple TV+ | Infuse | |
| ☁️ Cloud Storage | iCloud | Aliyun Drive | OneDrive | |
| 📱 Social Media | X | Instagram | LinkedIn | |
| 🗨️ Forum | V2EX | Reddit | |
| ⌚ Fitness Tracking | Apple Health | Apple Fitness+ | |
| 🔒 Security | Shadowrocket | Surge | |
| 🤖 Automation | Apple Shortcuts |
Please use Safari for the best experience. © 2025-2034 Neardws.com All Rights Reserved.